




SVPWM調制三電平對母線電容充放電時,使中點電位偏移。采用SVPWM方法,通過分配流入中點電流相反的冗余小矢量的作用時間來控制中點電位平衡。CB-PWM同樣可疊加零序分量來控制中點電位,根據載波及電流方向,判斷出所需注入零序分量方向,控制框圖如圖6所示。
1.5 電壓、電流環及限功率控制算法
圖7給出了系統電壓控制示意圖,電壓環使用PI控制器,令母線電壓跟隨電壓給定值Uref,電壓環輸出作為電流環的給定值。電壓閉環給定值分兩種:緩啟動給定值和正常運行給定值、穩壓饋能和牽引網模式。穩壓饋能和牽引網模式適用于調試階段使用。

緩啟動:母線電壓從0V開始由輔助接觸器吸合緩沖,再由主接觸器吸合緩沖,最后啟動反向整流跟蹤牽引網電壓。
正常運行:電壓環給定 1500V~1600V可設置,正常情況下牽引網電壓高于停止電壓且低于啟動電壓(1650V~1950V可設)。本系統對電壓環的PI輸出會做相應限幅處理,滿足現場應用需求:當牽引網電壓在啟動電壓和停止電壓之間時,通過限制電壓環輸出限幅值來禁止逆變饋能,允許反向整流。當列車制動引起電壓抬升到啟動電壓及以上,通過放開電壓環限幅來啟動逆變饋能,并在電壓重新下降到停止電壓時禁止逆變饋能。
地鐵現場要求牽引網電壓大于啟動電壓后饋網功率從0到額定功率所需時間300ms~500ms,為保證饋網功率變化速率可控,對電壓環PI輸出進行限幅。PI限幅按固定步長遞增或遞減,步長根據設置的滿載饋能響應時間Tr、系統開關頻率fs以及額定電流Ir換算,電壓環PI輸出限幅變化步長為:

電壓環PI系數選擇必須滿足現場需求,積分環作用快慢跟Ki系數、啟動電壓和停止電壓均有關系。以最小的啟動電壓1650V,最高的電壓環給定1600V為計算依據,只要保證電壓環PI輸出變化速率大于300ms滿載饋能響應時間對應的限幅變化步長Istep(300ms)=(1111.0/(1500*0.3))=2.47即可。
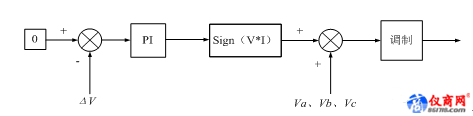
圖8給出了三相并網電流控制框圖,由電壓給定經過電壓PI調節器的輸出加上有功設置值Pset限幅后作為電流d值給定,同理電流q值給定由系統設置的無功Qset值決定;idf和iqf為電感電流反饋dq值,通過wL解耦系數進行解耦控制;電流環PI控制器輸出后疊加電網電壓前饋ud和uq,以提高系統對電網波動的抗擾性。

功率控制環實現輸出期望的功率,便于測試不同功率段性能指標。功率控制環是根據地鐵工況設置的功率對并網電流進行閉環限幅,使輸出功率精度滿足要求1%。有功、無功電流限幅式子如下:
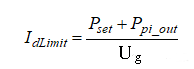

式中,Pset、Qset為用戶設置的有功功率和無功功率,Ppi_out、Qpi_out為電能芯片ADE7878實時計算的功率閉環調節輸出,Ug為電網線電壓有效值,限功率控制環路框圖如下:

























