汽車電子控制系統普遍遵循感知→控制→執行的工作流程。
傳感器作為感知單元獲取系統的工作狀態,控制單元處理傳感器信號并計算輸出控制指令,最終由執行單元完成相應動作。
以電動助力轉向系統(EPS)為例, 車輛運行過程中, 方向盤扭矩轉角傳感器監測方向盤轉角及扭矩信息,輪速傳感器監測車輪轉速, 控制器(ECU)通過 CAN總線實時獲取傳感器信號, 并根據特定邏輯實時處理信號,計算得到一個理想的助力力矩, 最后通過 MOSFET 控制電機,實現助力效果。
汽車動力、底盤、車身、電氣四大系統中,絕大部分的電子控制具備類似的工作原理,從感知、控制到執行環節,半導體器件無處不在,包括感知系統的傳感器,控制環節的微控制器(MCU)、通信芯片(CAN/LIN等)、模數轉換器(A/D),執行環節的功率器件(MOSFET、 IGBT、 DCDC)等。其中傳感器更是汽車的機會所在。

汽車傳感器可分為車輛感知、 環境感知兩大類。動力、底盤、車身及電子電氣系統中的傳感器屬于車輛感知范疇, ADAS以及無人駕駛系統中引入的車載攝像頭、毫米波雷達、激光雷達等屬于環境感知范疇。
本文重點講解汽車感知傳感器。
按照工作原理,汽車傳感器主要可分為 MEMS、磁、化學、溫度四大類,我們統計傳統汽油車上 MEMS 傳感器超 50 個, 磁傳感器超過 30 個,合計占比約90%。
MEMS 傳感器
MEMS 傳感器(Micro-Electro-Mechanical System)是一個將微型機械結構、微型傳感器、微型執行器、信號處理和控制電路以及接口、通信和電源模塊都集成于芯片上的微機電系統,在汽車上廣泛應用于壓力類以及運動類傳感器。
根據 Bosch 估計,目前一輛汽車上安裝有超過 50 個 MEMS 傳感器, 我們估計單車價值量 500-1000 元。應用較多的是壓力傳感器、加速度計、陀螺儀及磁力計等慣導系統傳感器。這些產品雖都采用微機電系統封裝,但對應原理各不相同。
壓力 MEMS:大多基于硅的壓阻效應,壓力作用于硅薄膜引起 4個電阻應變片電阻的變化,惠斯頓電橋輸出與壓力成正比的電壓信號,適用于中低壓場景,如發動機進氣歧管、胎壓檢測系統TPMS、真空度、油箱壓力等。中、高壓場合多采用陶瓷電容的技術路線。
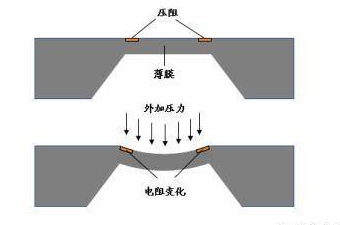
圖:硅壓阻式壓力 MEMS 工作原理
加速度 MEMS:基于牛頓第二定律,通過在加速過程中對質量塊對應慣性力的測量來獲得加速度值。采用電容式、壓阻式或熱對流原理,分為低 g (重力加速度)和高g 兩大類,區別在于測量的加速度范圍不同, ±2g~±24g 等低 / 中 g 傳感器用于主動懸架、ESP、側翻、導航等非安全類系統, ±200g 等高 g傳感器用于氣囊等安全系統。
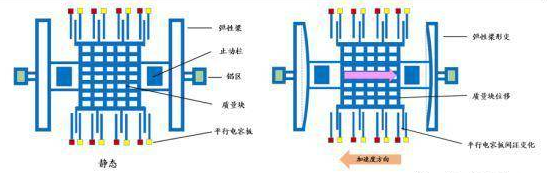
圖:電容式 MEMS 加速度計工作原理
角速度 MEMS/ 陀螺儀:基于 Coriolis 力原理:一個物體在坐標軸中直線移動時,假設坐標系旋轉,物體會受到一個垂直的力和垂直方向的加速度。MEMS 陀螺儀通常安裝兩個方向的可移動電容板,徑向電容板加振蕩電壓迫使物體作徑向運動,而當旋轉時,橫向電容板能夠測量由于橫向 Coriolis運動帶來的電容變化,從而計算出角速度。最多可測量 x/y/z 三軸角速度,用于側翻、車身穩定控制系統、慣性導航 IMU 等。
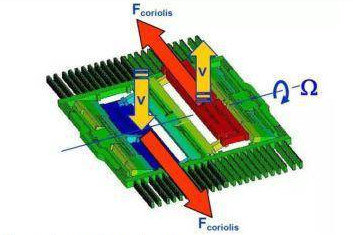
圖:MEMS 陀螺儀工作原理
磁力計:運動過程中地磁場改變磁力計主磁場方向,從而引起導電薄膜內磁場方向與電流夾角值變化,而夾角的變化與電阻值呈線性關系,通過換算可以確定與地磁場的相對位臵來進行定位。
磁力計主要與加速度計、陀螺儀一起,應用于慣性導航系統中(Dead Reckoning), 用于在 GPS信號缺失時,通過測量與地磁場的相對位臵來判斷汽車的航向角及姿態。磁力計基于磁效應,采用 MEMS 工藝,由于霍爾效應靈敏度難以達到要求,普遍應用 AMR來感應地磁場。
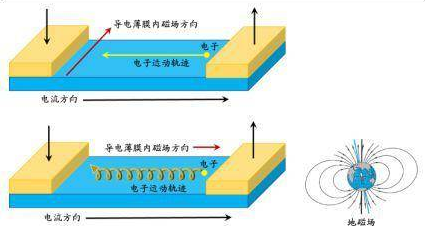
圖:MEMS AMR 磁力計工作原理
磁傳感器
目前磁傳感器有四代技術, 分別為霍爾效應、 AMR (Anisotropic magnetoresistance effect)、 GMR (Giant magnetoresistance effect)、 TMR (Tunnel magnetoresistance effect),主要用于測量運動量,具體產品形式為速度傳感器、 線性及角度位臵傳感器、電流傳感器等。
霍爾傳感器:目前汽車上應用的磁傳感器大多基于霍爾效應的原理,簡稱為霍爾傳感器。主要用來測量運動量,如位臵、角度、速度、電流等,分為霍爾開關、位臵霍爾(線性 / 角度 /3D)、轉速霍爾、電流霍爾及導航系統磁力計等類型。
霍爾傳感器的測量原理——霍爾效應是指當電流通過磁場中的霍爾元件時,磁場會對霍爾元件中的電子產生垂直于電子運動方向的作用力,使得在垂直導體與磁感線方向正負電荷聚集,形成霍爾電壓。
霍爾傳感器的測量原理是運動切割磁感線引起磁場以及感應電流的變化,最終導致霍爾電壓的變化,依據該變化來探測目標的運動狀態變化。

圖:霍爾效應原理圖
xMR 磁阻:AMR、 GMR、 TMR 均基于磁阻原理,作為下一代磁傳感器技術,憑借性能優勢,滲透率正日益提升。目前 AMR/GMR 技術已經在輪速、方向盤轉角 / 扭矩、電子節氣門位臵、曲軸和凸輪軸轉速等傳感器領域得到規模化應用。
TMR 傳感器的性能提升十分顯著,利用磁性多層膜材料的隧道磁電阻效應,與霍爾元件、 AMR、 GMR 相比, 優勢突出:
第一, 溫度性能好,前端模塊電鍍了納米厚度的氧化層, 而不是半導體;
第二, 電流功耗小,從霍爾的 5-20mA 減少到 μA 級別;
第三, 敏感性很強,規模上量后成本更低, 霍爾元件需要用釹鐵硼等強力磁鐵。
TMR 傳感器將憑借突出的產品性能, 在高要求應用場景替代霍爾傳感器:
1、 角度、轉速、位臵類傳感器:包括 BLDC 轉子位臵、方向盤轉角、輪速、節氣門位臵、曲軸 / 凸輪軸角度等功能安全等級要求非常高的應用場合。
2、 液位傳感器:TMR 取代干簧管, 干簧管容易破裂、 一致性差、 成本較高, TMR 靈敏度高、成本低、克服破碎問題。
化學傳感器
氧傳感器:汽車中一般設臵前氧和后氧兩個氧傳感器。前氧傳感器檢測混合排氣中氧的含量, 并反饋給發動機 ECU修正噴油量,控制混合氣的空燃比在理論值附近,使三元催化達到效率最高。后氧傳感器檢測催化轉化后混合氣體中的氧含量,用來判定三元催化轉化器是否失效。
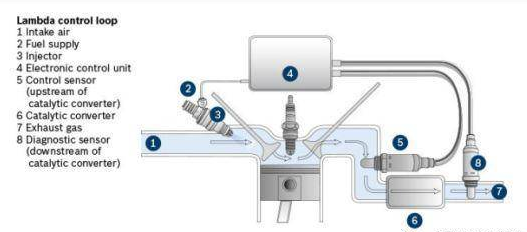
圖:氧傳感器工作原理
氮氧化物傳感器:氮氧化物傳感器主要應用在柴油車后處理 SCR 系統(Selective Catalytic Reduction System),用于檢測尾氣催化還原之后NOx 的含量是否滿足排放要求。
溫度傳感器
汽車上普遍用熱敏電阻來測量溫度,可分為 PTC 和 NTC 兩類。
NTC: 電阻隨溫度升高而降低,主要用來測量氣體、液體、環境溫度,包括冷卻液、進氣管、空調蒸發器出口、車內外等溫度檢測。
PTC: 超過一定溫度時,電阻明顯增大, 主要用于過流保護、溫度限制、加熱等場景,如電機保護傳感器。
面對高溫場合,如發動機排氣歧管、三元催化器溫度高達 800℃以上, 傳統的熱敏電阻無法滿足要求,通常采用鉑電阻溫度傳感器進行測量。