來自法國國家科學研究中心(CNRS)和香港大學的研究人員提出了一種基于柔性磁膜的觸覺傳感器。
通過設計正交磁化的Halbach陣列,該觸覺傳感器可以實現三維力的自解耦,將標定復雜度從三次方降低到一次方,極大地簡化了傳感器結構以及標定流程,為低成本的三維力觸覺傳感提供了新思路。

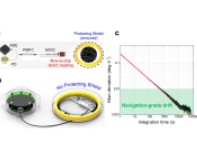
圖1 傳感器結構與原理
相關成果以“A soft skin with self-decoupled three-axis force-sensing taxels”為題,已發表在Nature子刊Nature Machine Intelligence上。
自解耦三維柔性觸覺皮膚
如圖1所示,該觸覺傳感器的主體部分從上往下分為三層:柔性磁膜,彈性硅膠,以及PCB電路板(帶有霍爾傳感器)。
當磁膜在外力作用下發生變形后,磁膜與霍爾傳感器之間的距離將發生變化,因此由霍爾傳感器測得的磁場大小及方向也會隨之發生變化,該三維磁場信息經過解耦算法可以被轉換為三維力信息。
之前的研究表明單面多極正弦磁化的Halbach陣列有二維自解耦的特性,即在x-z平面內,磁感應強度B只和z方向有關,磁場方向RB只和x方向有關,因此可以用于二維力的自解耦。
由于磁場滿足疊加原理,研究人員發現,將兩個正弦磁化的Halbach陣列磁場進行正交疊加后,二維自解耦的特性在一定條件下通過簡化可以被推廣到三維。

圖2 Halbach陣列的磁場正交疊加
即B只和z方向有關,Rxz只和x方向有關,Ryz只和y方向有關,其中B,Rxz,Ryz在簡化前后的歸一化絕對誤差(NAE)分別為2.88%、3%和4.56%。
基于正交磁化Halbach陣列三維自解耦的特性,三維力Fz、Fx、Fy可以分別通過B、Rxz、Ryz解耦出來。
為了驗證上述三維力自解耦方法的可行性,研究人員設計并制作了三個具有不同形狀、大小、量程及靈敏度的觸覺傳感器,以用于不同的實際應用。
人工膝關節三維力分布測量
第一個應用是測量人工膝關節處的三維力分布:

膝關節由3D打印而成,下半部分由觸覺傳感器(含24個傳感單元)及ATI六維力/力矩傳感器組成;上半部分由機械臂驅動模擬人類膝關節的彎曲和滑動。

實驗顯示,觸覺傳感器可以提供實時的三維力分布測量,且測得的合力與真實值(來自ATI傳感器)誤差很小。
觸覺示教機器人制作咖啡
另一個應用是基于觸覺的教機器人制作咖啡。
如下圖所示,研究人員將一個可以檢測力和力矩的3x3觸覺傳感器陣列安裝在了機械夾爪的一端(取矩點為傳感器中心),當操作員輕觸或滑動傳感器表面的時候,傳感器將檢測到相應方向的力和力矩。

該力和力矩乘以一個增益矩陣(gain matrix)之后將被分別轉換為機械臂末端執行器的運動增量(移動+轉動),并通過一個阻抗控制器(impedance controller)更新機械臂的末端姿態。
機械夾爪的開合可由特定的觸覺信號編程控制,如快速上下滑動傳感器表面控制“關閉夾爪”,快速上下搖動所夾物體控制“打開夾爪”。
通過直接和傳感器或所夾物體交互,機械臂及夾爪可以被精確控制并依次完成夾持水杯、倒水:

以及舀取咖啡粉,攪拌咖啡,放回咖啡勺等動作。

在這一過程中示教人員無需按壓示教按鈕(即傳統示教方法),可以直接和物體交互,提供了一種更直觀簡單的示教方式。
示教結束后,機械臂及夾爪只需要重復示教過程中記錄的運動軌跡及開合狀態即可完成咖啡的制作。研究人員表示由于未使用視覺反饋,軌跡重復階段所有物品的位置都需與示教階段一致,之后可通過引入視覺反饋和AI算法來實現更加智能和通用的模仿學習。
另外,通過編程,可以切換機械臂示教模式和自適應抓取模式(根據切向力實時動態調整法向夾持力)。

研究人員還展示了柔性PCB基底的觸覺傳感器在可穿戴設備中的應用。如下圖所示,通過將一個具有柔性PCB基底的觸覺傳感單元放置于膝蓋支架(knee brace)內側,我們可以監測使用者在日常活動過程中膝蓋支架與腿部的三維接觸力,這展示了三維柔性觸覺傳感器在健康監測領域的潛在應用。

本文的作者包括來自法國國家科學研究中心CNRS-LIRMM實驗室的閆友璨(博士后研究員)、Ahmed Zermane(博士)、Abderrahmane Kheddar教授,以及香港大學的潘佳教授。