隨著無人駕駛汽車在汽車行業中變得越來越重要,傳統的衛星導航定位精度大概在10米左右,不足以應對自動駕駛和車聯網V2X的場景。從目前的L2等級的高級駕駛輔助系統 (ADAS) 到半自動駕駛,再到未來的完全自動駕駛 (AD),無人駕駛系統功能的復雜性正在急劇增加。相應地,有兩個方面的重大挑戰。
挑戰一、衛星導航硬件在環GNSS HiL
在各種可能的條件和變化下驗證自動駕駛和車聯網功能對汽車開發領域提出了重大挑戰。例如,自動緊急制動 (AEB) 和自適應巡航控制 (ACC) 之類的功能,甚至是在高速公路自動駕駛條件下的全自動功能,都需要在多種場景和車輛配置下,對車輛進行大量的功能性和非功能性的驗證和優化。
目前,ADAS 和 AD 驗證主要采用兩種方法:在公共道路或試驗場上進行駕駛測試和基于硬件在環 (HiL)或者整車在環ViL的測試。
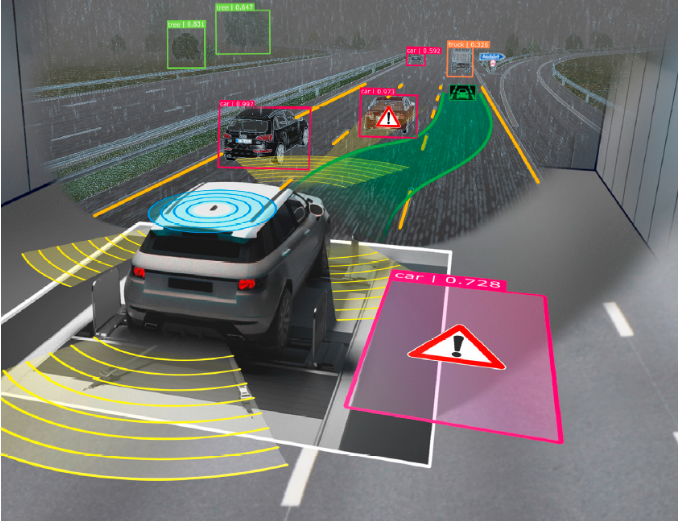
圖1:自動駕駛汽車的硬件在環HiL和整車在環ViL測試平臺
挑戰二、高精度衛星導航
GNSS市場在很多因素的驅動下正在快速發展,由于車聯網市場、無人駕駛的出現,車載導航的要求也在不斷增加,從最初的標準定位SPS(Standard Positioning System)需求,發展到現在的高精度定位PPS(Precise Positioning System)需求。
實時衛星導航模擬器

圖2:R&S SMBV100B(左)與 SMW200A(右)
SMBV100B和SMW200A是高性價比的通用矢量信號發生器,具備優異的射頻指標,支持幾乎所有的通信和廣播標準,通過配置一個或多個可選選件,支持 GPS、Glonass、Galileo和BeiDou,是全能衛星導航模擬器。
R&S衛星導航模擬器為接收機測試提供了強大和可靠的單表解決方案,它們提供了以下關鍵特性:
? 實時衛星導航模擬器,支持GNSS所有頻段,包括:L1/L2和L5,且可單臺儀表同時產生所有頻段導航信號;
? SMBV最多可支持至102顆衛星,SMW最多可支持至612顆衛星;
? 模擬器支持自定義或預定義的地理位置等多種軌跡文件;
? 支持實時HiL仿真,數據更新率高達100Hz;
? 可模擬動態場景下的遮擋效應和靜態場景下的多徑效應;
? 支持大氣層等場景模型;
? 單表解決方案:無需外部軟件或外部電腦。
通用汽車衛星導航接收機測試解決方案
通用汽車衛星導航接收機測試方法
如果車載導航接收機或模塊本身可以直接通過射頻線纜直連,同時,提供串口的NMEA數據輸出,則可以直接進行直連測試。此方式的優勢是精確控制功率和屏蔽外界干擾。如果車載導航接收機已經做成成品了,無法提供射頻接口直連的方式,則可以使用OTA的空口測試方法。如下圖所示:
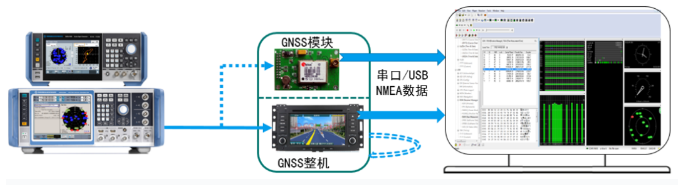
圖3:車載導航接收機直連測試方框圖
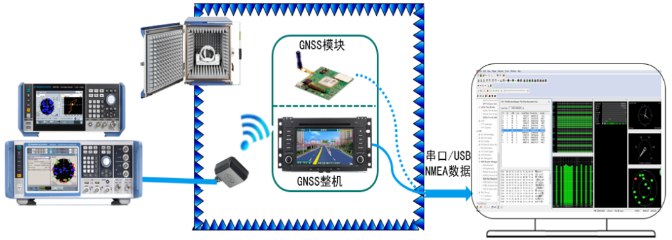
圖4:OTA測試方框圖
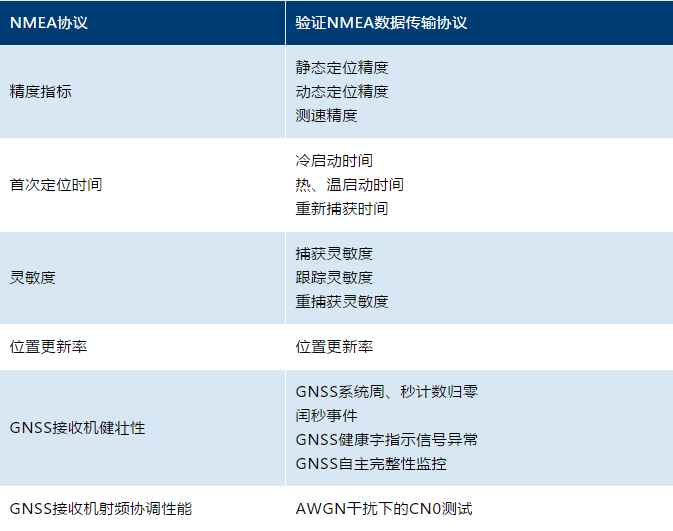
汽車導航接收機測試項目
GNSS高精度衛星導航測試解決方案
GNSS多頻導航接收機測試方案
GNSS多頻接收機可同時接收同一個導航信號多個頻率的載波信號。利用多頻載波信號受電離層延遲影響的差異性,可以消除電離層對電磁波信號的延遲的影響。因此,GNSS多頻接收機可用于長距離精密相對定位。另外,GNSS多頻接收機借助于在兩個頻率上或多個頻率上的觀測可加速整周模糊度的解算。
SMW200A或SMBV100B都可單臺儀表實現多頻信號產生,如下圖所示,通過SMBV100B實現L1/L2/L5任意頻率組合方式的測試框圖:

圖5:雙頻(L1+L2/L5)接收機或多頻(L1+L2+L5)測試框圖
載波相位實時動態差分接收機RTK測試
載波相位動態實時接收機RTK:Real - Time Kinematic。是實時處理兩個測量站載波相位觀測量的差分方法,將基準站采集的載波相位發給用戶接收機,進行求差解算坐標。
此類接收機,本身就是具備高精度定位功能,大多數都會采用雙頻/多頻接收機的定位方式,目的是提高定位精度。同時,在校正數據的傳輸過程中,有私有網絡和公有網絡,私有網絡主要是通過ASK/FSK/WLAN的通信方式,大多工作在ISM頻段,如433MHz。公有網絡大多是基于運營商的移動通信網絡,如:GSM、LTE等。其測試框圖如下:
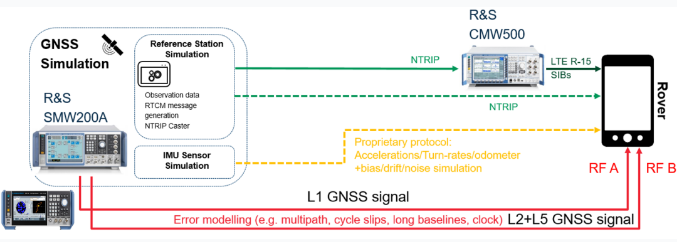
圖6:DNSS/RTK接收機測試框圖
汽車導航硬件在環HiL測試
硬件在環是一種測試方法,其中,被測設備或系統(DUT或SUT)被嵌入到模擬器系統中,該模擬器系統主要實時地模擬設備或系統的真實環境,允許在閉環中實時評估其在整個系統中的性能。HIL測試中的一部分是GNSS衛星信號的仿真。為此,使用了GNSS模擬器,例如R&S SMBVB或SMW,如下圖所示:
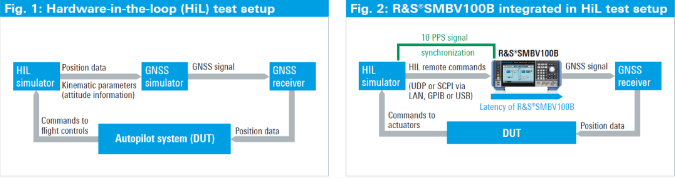
圖7:GNSS硬件在環HiL測試框圖
所有R&S GNSS模擬器都可以實時進行遠程控制,可以集成到動態HIL環境中。在GNSS HIL仿真器中可指示位置數據和動力學參數,例如速度,加速度和加加速度,而GNSS模擬器可實時且無信號中斷地調整仿真的運動,還可處理HiL仿真的車輛姿態信息,例如俯仰,側傾和偏航值。在HIL應用中,SMBV和SMW高達100Hz的數據更新率以及低至 20 ms 的處理延遲共同保障了高處理效率和信號精度。
車載導航自動化測試
R&S SMBV100B/SMW200A都支持自動化測試,可以在操作界面手動控制或遠程控制。遠程控制需要在上位機通過LAN、GPIB或USB連接SMBV。測試方案如下:
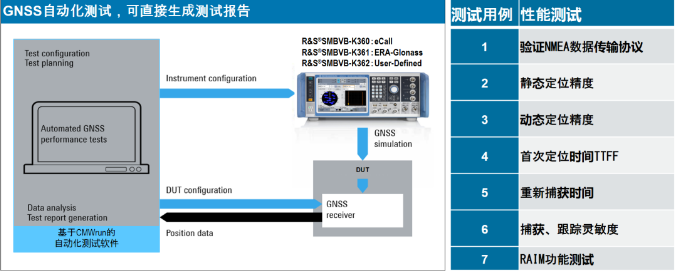
圖8:車載導航接收機自動化測試框圖
結語
本文描述了利用GNSS衛星導航模擬器進行的一系列典型車載導航接收機驗證測試,涉及內容從基本的衛星導航定位測試、高精度衛星導航定位測試到車載衛星導航硬件在環HiL測試方案。在GNSS接收機測試環境中使用的標準GNSS信號仿真器可為工程師提供最大的靈活性,幫助他們實施調整和控制,輕松地進行重復測試。
在這個環境中,本文中列出的測試將為車載導航接收機的測試和驗證創建一個標準驗證流程。靈活的信號源不僅支持GNSS接收機測試,還支持其他無線制式和標準測試。