1、市場(chǎng)趨勢(shì)和測(cè)量需求趨勢(shì)
為了應(yīng)對(duì)網(wǎng)絡(luò)、服務(wù)器和存儲(chǔ)速度和容量的快速提高的需求,促進(jìn)了100GbE,400Gbp和1Tbps的通信系統(tǒng)的開(kāi)發(fā)。而超過(guò)30Gbps的速率接口被這些系統(tǒng)所采用。
當(dāng)處理高于30Gbps速率的信號(hào)時(shí),相比傳統(tǒng)較低速信號(hào)具有更大的挑戰(zhàn)。本文描述了如何處理時(shí)鐘和數(shù)據(jù)信號(hào)的傳輸差異,進(jìn)行高速信號(hào)的抖動(dòng)容限測(cè)試,以及處理高速傳輸?shù)牟罘中盘?hào)。

2、測(cè)試準(zhǔn)備
準(zhǔn)確的測(cè)量要求正確使用測(cè)量儀器。此外,也需要正確理解儀器的限制。超過(guò)這些限制的測(cè)量通常測(cè)量的是儀表自身的特性,而非待測(cè)件(DUT)的特性。例如,當(dāng)使用采樣示波器進(jìn)行波形測(cè)量時(shí),如果波形內(nèi)包含由采樣示波器帶寬范圍外的頻率分量,那么輸入波形的真實(shí)特性不會(huì)被顯示,相反,顯示的是采樣示波器的特性。
對(duì)于抖動(dòng)容限測(cè)試來(lái)說(shuō)也是類似的,如果在測(cè)試中抖動(dòng)超過(guò)了儀器中設(shè)置抖動(dòng)容限,儀器的抖動(dòng)容限而非DUT的抖動(dòng)容限會(huì)被顯示在結(jié)果中。如果測(cè)試儀器內(nèi)部包含有D-flip-flop,FIFO,或者其他重定時(shí)電路或者類似時(shí)鐘恢復(fù)的PLL電路,此類電路會(huì)成為抖動(dòng)容限測(cè)試的瓶頸。當(dāng)進(jìn)行抖動(dòng)容限測(cè)試時(shí),知道測(cè)量?jī)x器的實(shí)際測(cè)試性能限制非常有必要。
即使在測(cè)量系統(tǒng)中的測(cè)量?jī)x器有足夠的抖動(dòng)容限,測(cè)試結(jié)果也許會(huì)比DUT實(shí)際特性更差,取決于實(shí)際設(shè)置。最近數(shù)據(jù)信號(hào)速率提升要求嚴(yán)格評(píng)估抖動(dòng)的影響,以保護(hù)信號(hào)傳輸質(zhì)量。由于噪聲環(huán)境的不利影響(例如來(lái)自電源、熱量及PLL),測(cè)試器件抖動(dòng)的注入變得愈發(fā)復(fù)雜和快速,并且總抖動(dòng)量呈現(xiàn)上升趨勢(shì)。在這些條件下,抖動(dòng)容限測(cè)試必須考慮過(guò)去不會(huì)構(gòu)成大問(wèn)題的項(xiàng)目的影響,例如測(cè)試系統(tǒng)中時(shí)鐘和數(shù)據(jù)信號(hào)的路徑長(zhǎng)度差異。
下一節(jié)介紹處理時(shí)鐘和數(shù)據(jù)路徑長(zhǎng)度時(shí)的注意事項(xiàng)。
3、時(shí)鐘和數(shù)據(jù)路徑長(zhǎng)度的差異
本節(jié)描述測(cè)量系統(tǒng)中時(shí)鐘和數(shù)據(jù)路徑長(zhǎng)度,以脈沖碼型發(fā)生器(PPG)通過(guò)待測(cè)件和時(shí)鐘恢復(fù)單元(CRU)鏈接至誤碼檢測(cè)器(ED)為例。
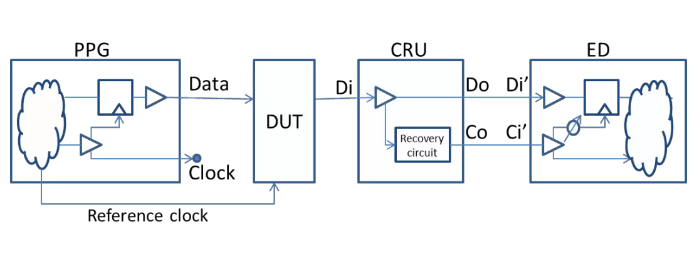
圖 3.1:抖動(dòng)容限測(cè)試系統(tǒng)
DUT的數(shù)據(jù)輸出鏈接至CRU。CRU將數(shù)據(jù)信號(hào)分為兩路:一路通過(guò)直接通過(guò),未改變信號(hào)后進(jìn)行輸出,另一路連接至?xí)r鐘恢復(fù)電路。CRU輸出數(shù)據(jù)信號(hào),時(shí)鐘信號(hào)從數(shù)據(jù)信號(hào)中恢復(fù)。此處,比較了時(shí)鐘的定時(shí)和CRU的數(shù)據(jù)輸出。由于數(shù)據(jù)經(jīng)由CRU 被簡(jiǎn)單分割,數(shù)據(jù)會(huì)通過(guò)一個(gè)更短的路徑。同時(shí),時(shí)鐘信號(hào)基于數(shù)據(jù)信號(hào)恢復(fù),時(shí)鐘恢復(fù)電路本身會(huì)有一些延時(shí)。因此,相較于數(shù)據(jù)信號(hào),時(shí)鐘信號(hào)會(huì)有更長(zhǎng)的路徑。

圖 3.2:CRUI/OTiming
圖3.2展示的并非突發(fā)數(shù)據(jù)輸入直到時(shí)鐘恢復(fù)的時(shí)間。而展示的是特定數(shù)據(jù)交叉點(diǎn)和相位對(duì)齊時(shí)鐘邊緣,其中Di是 CRU輸入數(shù)據(jù), Do是CRU 輸出數(shù)據(jù), Co是CRU恢復(fù)的時(shí)鐘輸出。
雖然使用實(shí)際CRU無(wú)法確定數(shù)據(jù)邊緣定時(shí)相位是否對(duì)齊,但如果相位對(duì)齊,邏輯上我們可以得出結(jié)論,即使在比較滿的比特率下,圖3.2中的Dt和Ct時(shí)間也不會(huì)改變。圖中Dt 是從數(shù)據(jù)輸入到CRU 至輸出的數(shù)據(jù)傳輸延遲,Ct是從數(shù)據(jù)輸入到CRU至恢復(fù)時(shí)鐘輸出的延遲。
雖然我們不能通過(guò)觀察單個(gè)比特率下的Co和Do波形,來(lái)確定Dt和Ct的邊傾角是否恒定,但是我們可以通過(guò)觀察多個(gè)比特率下的波形來(lái)識(shí)別Dt和Ct恒定的數(shù)據(jù)和時(shí)鐘邊緣。無(wú)論比特率如何,Dt和Ct之間的關(guān)系是恒定的,這種關(guān)系被稱為“絕對(duì)相位對(duì)齊”。
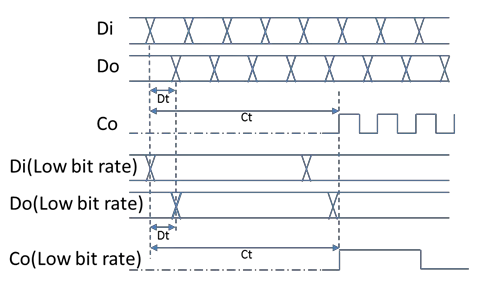
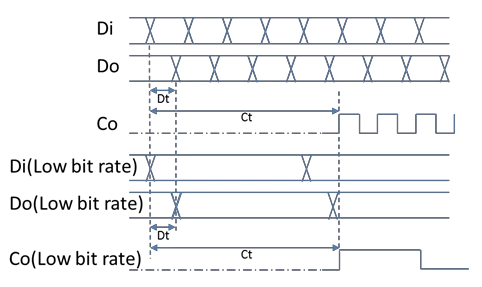
圖 3.3:CRUI/OTiming(低比特率)
在測(cè)試系統(tǒng)中,我們還必須知道在ED中時(shí)鐘和數(shù)據(jù)信號(hào)的路徑長(zhǎng)度的差異。為了準(zhǔn)確測(cè)量數(shù)據(jù)信號(hào),儀器的設(shè)計(jì)必須使到第一個(gè)D-flip-flop是最短的。時(shí)鐘信號(hào)路徑往往比數(shù)據(jù)信號(hào)路徑更長(zhǎng),因?yàn)樵贓D端后部的電路生成分頻時(shí)鐘。如圖3.4所示,這導(dǎo)致Ct-dff時(shí)間比Dt-dff.更長(zhǎng)。
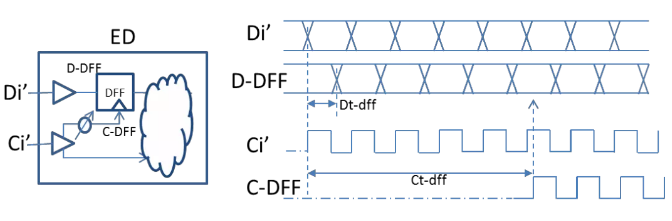
圖 3.4:ED 中的路徑和時(shí)序
此外,如果具有D-flip-flop的單元,例如預(yù)加重單元,在測(cè)試系統(tǒng)的中間被連接,PPG和預(yù)加重間數(shù)據(jù)和時(shí)鐘信號(hào)路徑長(zhǎng)度必須以相同方式確認(rèn)。
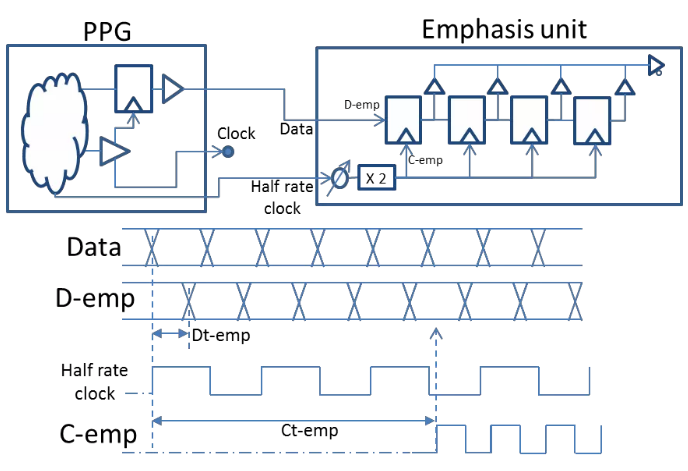
圖3.5: PPG和預(yù)加重模塊間的連接和時(shí)序
例如,在預(yù)加重的情況下,PPG 輸出半速率時(shí)鐘至預(yù)加重單元,預(yù)加重單元加倍后變?yōu)槿贂r(shí)鐘。在這種情況下,PPG和預(yù)加重單元間由于使用倍頻半速率時(shí)鐘的電路延時(shí),使得時(shí)鐘傳輸時(shí)延(C-emp)比數(shù)據(jù)傳輸時(shí)延更大(D-demp)。
在這些情況下,為了在這些設(shè)備間對(duì)齊時(shí)鐘和數(shù)據(jù)的相位,用于連接如CRU和ED、PPG和預(yù)加重單元的線纜長(zhǎng)度,必須考慮到設(shè)備內(nèi)部信號(hào)路徑的差異以進(jìn)行調(diào)整。由于CRU和ED之間的時(shí)鐘路徑由于(Ct–Dt)+(Ct-dff–Dt-dff)更長(zhǎng),因此數(shù)據(jù)線纜必須根據(jù)時(shí)延差來(lái)延長(zhǎng)(圖.3.2和3.4)。相似的,PPG和預(yù)加重單元時(shí)鐘和數(shù)據(jù)可以通過(guò)延長(zhǎng)數(shù)據(jù)路徑來(lái)對(duì)齊(圖.3.5)。
如果抖動(dòng)影響比較小,在ED端時(shí)鐘和數(shù)據(jù)信號(hào)絕對(duì)對(duì)齊是沒(méi)有必要的。如果在ED中第一個(gè)D-flip-flop中時(shí)鐘和數(shù)據(jù)滿足保持時(shí)間和設(shè)置時(shí)間的條件,便可以進(jìn)行有效測(cè)量。錯(cuò)誤檢測(cè)器有自動(dòng)搜索和其他特性以自動(dòng)調(diào)整數(shù)據(jù)和時(shí)鐘關(guān)系,所以一般情況下,無(wú)需關(guān)注儀器內(nèi)部的數(shù)據(jù)和時(shí)鐘的關(guān)系。
相似的,如果抖動(dòng)的影響比較小,用戶無(wú)需調(diào)整Anritsu 預(yù)加重單元的相位關(guān)系,因?yàn)槠鋬?nèi)部會(huì)自動(dòng)進(jìn)行時(shí)鐘和數(shù)據(jù)相位的調(diào)整。
接下來(lái),那抖動(dòng)影響比較大的情況如何?如上述,我們無(wú)需考慮在抖動(dòng)影響較小時(shí)的絕對(duì)相位,但是如果抖動(dòng)影響比較大時(shí),測(cè)量系統(tǒng)必須考慮絕對(duì)相位。
接下來(lái)的例子描述了抖動(dòng)帶來(lái)的影響,具體通過(guò)比較將10-Hz,10 UI,正弦抖動(dòng)注入于10-Gbps數(shù)據(jù)信后數(shù)據(jù)交叉點(diǎn)的變化來(lái)觀察。
在50-Ω 傳輸線纜上,電信號(hào)通常以4.75 ns/m 的速度傳輸。這一位這當(dāng)使用示波器進(jìn)行數(shù)據(jù)信號(hào)測(cè)量時(shí),每改變線纜長(zhǎng)度10cm時(shí),波形位置會(huì)位移475 ps。
10-Gbps 數(shù)據(jù)信號(hào)的每個(gè)周期都是100-ps 長(zhǎng),所以注入10UI抖動(dòng)會(huì)使交叉點(diǎn)在1000ps內(nèi)往返。在這種情況下,數(shù)據(jù)交叉點(diǎn)將移動(dòng)等效于1000 ps x 2的距離,在使用上述4.75 ns/m 的電信號(hào)傳輸速度進(jìn)行轉(zhuǎn)換,這個(gè)長(zhǎng)度相當(dāng)于約42 cm。
接下來(lái),考慮抖動(dòng)調(diào)制速率。10 Hz抖動(dòng)調(diào)制率意味著以10 Hz速率移動(dòng)42 cm (即 每100ms)。相似的,10Mhz 的抖動(dòng)調(diào)制率意味著每100 ns移動(dòng)42 cm距離。換言之,在相同抖動(dòng)下,更快的抖動(dòng)調(diào)制率會(huì)有更大的移動(dòng)距離。
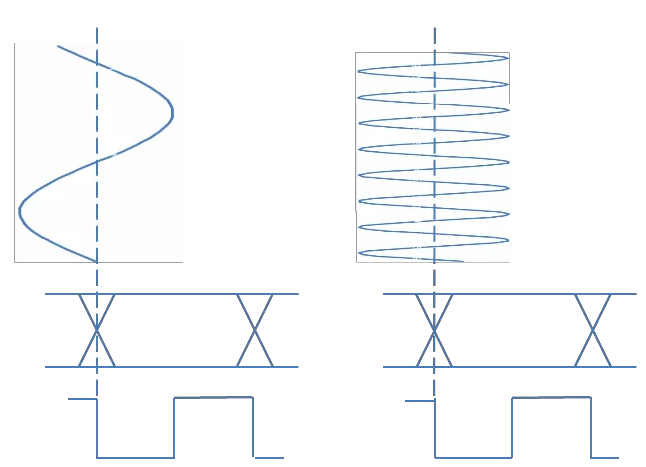
圖 3.6: 1UI 抖動(dòng)下不同抖動(dòng)調(diào)制率示例
現(xiàn)在,考慮時(shí)鐘和數(shù)據(jù)路徑不同的情況(即并相位并非完全對(duì)稱)。
例如,如果時(shí)鐘線纜是1 m,數(shù)據(jù)線纜為50 cm,會(huì)有50cm 的路徑差距。換言之,數(shù)據(jù)信號(hào)會(huì)在發(fā)送后的2.375 ns后被收到,時(shí)鐘信號(hào)會(huì)在發(fā)送后4.75 ns后被收到。通常情況下,接收機(jī)會(huì)考慮到此時(shí)鐘延遲來(lái)調(diào)整相位,以優(yōu)化時(shí)鐘和數(shù)據(jù)之間的關(guān)系。也就是說(shuō),相位的設(shè)置將使上升沿靠近兩個(gè)數(shù)據(jù)交叉點(diǎn)的中心以保證足夠的設(shè)置和保持時(shí)間。
現(xiàn)在,考慮當(dāng)抖動(dòng)注入于同步數(shù)據(jù)并且同時(shí)發(fā)送的時(shí)鐘信號(hào)時(shí)的變化,只關(guān)注由于抖動(dòng)引起的時(shí)鐘上升沿和數(shù)據(jù)交叉點(diǎn)之間關(guān)系的變化。即使在存在抖動(dòng)的情況下,在時(shí)鐘和數(shù)據(jù)同事改變的情況下,并且最佳相位關(guān)系得到保持,那么錯(cuò)誤不會(huì)出現(xiàn)。然而,在數(shù)據(jù)或時(shí)鐘接收路徑包含限制抖動(dòng)分量帶寬的PLL之類的電路,并且抖動(dòng)調(diào)制頻率在電路帶寬之外,會(huì)在接收測(cè)產(chǎn)生錯(cuò)誤。錯(cuò)誤發(fā)生的原因是時(shí)鐘和數(shù)據(jù)中的抖動(dòng)量不同,并且時(shí)鐘和數(shù)據(jù)之間的相位關(guān)系將超過(guò)接收電路的設(shè)置和保持時(shí)間限制。為了描述導(dǎo)致絕對(duì)相位誤差的機(jī)理,該解釋假定測(cè)量系統(tǒng)中沒(méi)有帶寬限制電路。
由抖動(dòng)引起的時(shí)鐘和數(shù)據(jù)相位關(guān)系變化以電信號(hào)本身相同速度傳輸。因此,如果時(shí)鐘和數(shù)據(jù)邊緣同時(shí)開(kāi)始移動(dòng),并且路徑長(zhǎng)度差距達(dá)到50-cm,則數(shù)據(jù)的變化將在2.375ns內(nèi)到達(dá)接收機(jī),而時(shí)鐘測(cè)的變化是4.75 ns。如果在這2.375 ns內(nèi)接收側(cè)的時(shí)鐘和數(shù)據(jù)相位差變得很大,以至于無(wú)法保證設(shè)置和保持時(shí)間,則信息無(wú)法正確傳輸,引起錯(cuò)誤。
注入10-Hz、10UI、正弦抖動(dòng)會(huì)引起時(shí)鐘和數(shù)據(jù)在1s 內(nèi)以100UI 往返移動(dòng)。在2.375 ns間隔器件,對(duì)時(shí)鐘和數(shù)據(jù)相位關(guān)系的影響應(yīng)該很小,因?yàn)橐苿?dòng)僅為475nUI(10UI/10Hzx2(往返)x2.375ns)。同時(shí),注入、10-MHz、10UI、正弦抖動(dòng)會(huì)對(duì)時(shí)鐘和數(shù)據(jù)相位關(guān)系有很大的影響,因?yàn)橥ㄟ^(guò)相同的計(jì)算,移動(dòng)為475mUI(10UI/10MHzx2(往返)x2.375ns)。
在較大抖動(dòng)調(diào)制速率、抖動(dòng)調(diào)制量以及時(shí)鐘和數(shù)據(jù)路徑長(zhǎng)度的差異時(shí),這種影響更大。這種影響會(huì)隨著比特率增加而增加,因?yàn)樵诟弑忍芈氏赂y保證接收機(jī)相位裕度。近期在數(shù)據(jù)傳輸速度的提升導(dǎo)致了更為嚴(yán)格的抖動(dòng)容限要求。因此,雖然在之前不考慮數(shù)據(jù)和時(shí)鐘的絕對(duì)相位,現(xiàn)在構(gòu)建測(cè)量系統(tǒng)時(shí)必須納入考慮范圍。
儀器制造商可以指定其時(shí)鐘和數(shù)據(jù)相位之間的差異。
4、差分測(cè)量時(shí)的注意事項(xiàng)
差分高速信號(hào)正在變得普及。差分信號(hào)的有幾點(diǎn)優(yōu)勢(shì)。例如,Data和xData可以作為其他信號(hào)的閾值電壓,同時(shí)減少Data和xData共模噪聲的影響。此外,相較于單端設(shè)備,獲得了兩倍的電壓裕度。然而,速率超過(guò)20Gbps信號(hào)需要仔細(xì)處理,因?yàn)樵谀承l件下,電壓和相位裕度比使用單端設(shè)備時(shí)更差。
下面將講述如何處理28Gbps差分信號(hào)。這類信號(hào)正在積極發(fā)展中。

圖 4.1:差分測(cè)量系統(tǒng)
如上所示系統(tǒng)中,當(dāng)PCB上的DUT通過(guò)線纜連接到ED時(shí),從DUT上輸出的差分信號(hào)通過(guò)PCB和線纜并連接到ED。當(dāng)處理差分信號(hào)時(shí),DUT上所有差分路徑必須有相同長(zhǎng)度。
雖然我們可以通過(guò)PCB上的路徑減少差分之間的誤差,但時(shí)使用PCB和測(cè)量線纜之間的電纜線路呢?這需要一個(gè)非常準(zhǔn)確的相位匹配線纜。28-Gbps 信號(hào)周期大約為35.7ps。如前節(jié)所述,電信號(hào)處于50-Ω的傳輸線纜上傳輸速度為4.75ns/m,所以周期為35.7ps 的28-Gbps信號(hào)的電長(zhǎng)度為7.5 mm。換言之,7.5 mm長(zhǎng)度的線纜會(huì)有1-bit 的延時(shí)。當(dāng)然,在默寫(xiě)條件下,系統(tǒng)不能正確處理差分信號(hào),因?yàn)槿绻€纜長(zhǎng)度只有2到3 mm,則偏差約為40%。

圖 4.2:差分信號(hào)和時(shí)延
在圖 4.2 所示的恒定高電平和低電平信號(hào)下,存在相位裕度小于電壓裕度的風(fēng)險(xiǎn)。然而,由于傳輸線纜帶寬和其他因素的限制,實(shí)際信號(hào)會(huì)受到ISI的影響。因此,不能保證在高電平和低電平之間完全變化。

圖4.3: 受ISI 和延時(shí)影響的差分信號(hào)
圖4.3 展示了差分信號(hào)間存在延時(shí)下,盡管使用了差分信號(hào),但單端設(shè)備的電壓裕度不會(huì)加倍。如果向信號(hào)中添加失真或者其他噪聲,則裕度會(huì)進(jìn)一步降低,當(dāng)他們作為差分信號(hào)處理時(shí),結(jié)果會(huì)比使用單端設(shè)備更糟。
此外,當(dāng)電纜彎曲或者拉伸時(shí),幾乎所有電纜長(zhǎng)度都會(huì)改變約2到3ps。盡管不怎么需要去擔(dān)憂這點(diǎn),但是使用單端設(shè)備或低比特率時(shí)彎曲電纜會(huì)改變使用快速信號(hào)(如28Gbps)時(shí)的電氣長(zhǎng)度周期的10%。
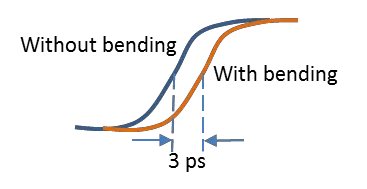
圖4.4:電纜彎曲引起的電氣長(zhǎng)度變化
如何在這種情況下使用差分信號(hào)?一種解決方案時(shí)在相位匹配的線纜的每一端增加一個(gè)范圍約為50至100 ps的小延遲裝置,并將電氣長(zhǎng)度調(diào)整為相等。設(shè)備之間的電纜彎曲也必須最小化。
即便如此,完全消除由于電纜彎曲而產(chǎn)生的微小誤差仍然是不可能的。在這種情況下,另一種解決方式是使用單端設(shè)備進(jìn)行測(cè)量,而不是使用差分信號(hào)。
下節(jié)介紹如何測(cè)量電纜長(zhǎng)度。
5、如何測(cè)量電纜長(zhǎng)度差異
本節(jié)介紹兩種確定電纜長(zhǎng)度是否不同的方法。第一種是使用采樣示波器檢查脈沖信號(hào)波形;第二種是使用TDR。
5.1 使用脈沖波形檢查
即使使用兩條相位匹配的線纜和具有多個(gè)輸入的采樣示波器,我們?nèi)耘f不能通過(guò)同時(shí)連接兩條電纜和測(cè)試兩個(gè)輸入來(lái)測(cè)量電纜長(zhǎng)度是否相同,因?yàn)槭静ㄆ鬏斎胫g存在內(nèi)部偏差。盡管幾乎所有示波器都有內(nèi)部調(diào)整時(shí)延的功能,但是我們只描述一種一次只測(cè)量一個(gè)輸入的方法。

圖5.1: PPG和采樣示波器組成的測(cè)試系統(tǒng)
設(shè)置在信號(hào)源(如PPG)處測(cè)量的比特率設(shè)置為1/10或者更低,模式長(zhǎng)度設(shè)置為1024位,16位為1,所有其他位為0。將要測(cè)量的第一根線纜(A) 連接到PPG輸出和示波器輸入。

圖 5.2:圖案參數(shù)
觀察示波器上PPG的輸出,以查看0到1之間的一個(gè)交叉點(diǎn),并將此波形保存在示波器上。接下來(lái),斷開(kāi)電纜A并將第二根電纜(B)連接到同一范圍輸入。如果電纜長(zhǎng)度非常相似,則可以看到存儲(chǔ)的第一電纜A波形和當(dāng)前顯示的第二根電纜B之間的差異。
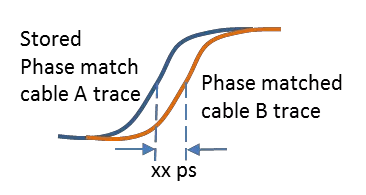
圖 5.3:存儲(chǔ)波形和顯示波形之間的差異
盡管可以通過(guò)在時(shí)間方向上增加分辨率來(lái)進(jìn)行更精確的測(cè)量,但是如果電纜之間存在較大的長(zhǎng)度差,則在改變電纜后可能不會(huì)顯示用于比較的邊緣。在這種情況下,通過(guò)在時(shí)間方向上設(shè)置一個(gè)粗略的分辨率,并在觀察兩個(gè)電纜波形的邊緣位置的同時(shí)逐漸增加分辨率來(lái)過(guò)的精確的測(cè)量。
5.2 使用TDR檢查
這種方法使用TDR測(cè)量電纜長(zhǎng)度,而不是使用PPG和示波器檢查脈沖波形。
將電纜的一端連接到TDR電纜端,并使電纜的另一端保持未連接狀態(tài)。測(cè)量開(kāi)始時(shí)的波形如下圖所示。

圖 5.4:TDR線纜測(cè)試顯示
對(duì)于未終結(jié)50-Ω線纜,顯示器上的垂直部分時(shí)阻抗變?yōu)闊o(wú)窮大的地方。增加時(shí)間方向的分辨率,放大出現(xiàn)無(wú)限阻抗的點(diǎn)并保存測(cè)量結(jié)果。連接第二根線纜并進(jìn)行相同測(cè)量。此處請(qǐng)注意,不是直接指示電纜長(zhǎng)度的差異,是中間軸上的差異時(shí)電纜長(zhǎng)度差異的兩倍,因?yàn)門DR從作用于發(fā)送脈沖并測(cè)量直到反射返回的時(shí)間,這意味著它顯示脈沖往返。
6、總結(jié)
使用高速信號(hào)正變得司空見(jiàn)慣。本文從測(cè)量抖動(dòng)容限和測(cè)量差分信號(hào)兩方面介紹了如何處理傳輸線長(zhǎng)度以精確測(cè)量這些信號(hào)。這種討論是一般性;更快比特率的情況仍有待解決。